Euler’s Theorem
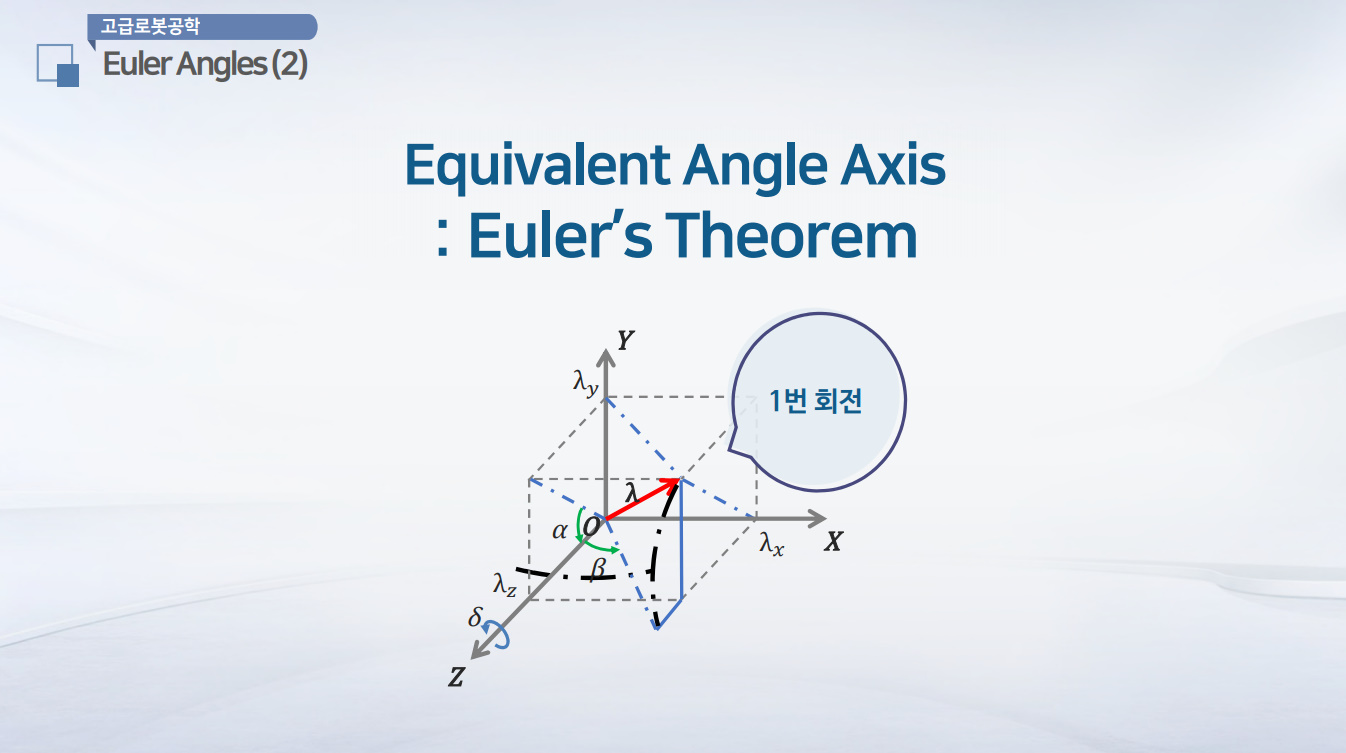
$\lambda$라는 축을 찾았다고 가정해보자, 이 축에 대해 완벽하게 한번만 회전한다면 회전을 이룰 수 있다 라고 했을 때, 이 $\lambda$를 우리가 가지고 있는 $z$축과 일치시키면 그 $z$축에 대해서 마지막에서 회전을 하고 다시 일치시킨 것을 거꾸로 되돌아온다면 그 $\lambda$라는 축에 대해서 $\delta$만큼의 회전을 충분히 쉽게 표현할 수 있을 겁니다.
.jpg)
이 방식을 오일러가 제안한 방법대로 위에 있는 그림에서 1번으로 먼저 $x$축에 대해서 $\alpha$만큼 회전하고 다시 2번째로 $y$축에 대해서는 $-\beta$, 즉 돌리는 방향이 반대입니다.
그렇기 때문에, $y$축에 대해서 $-\beta$로 가지고 오게 되면 $\lambda$가 $z$축과 일치하도록 위치시킬 수 있게 됩니다. 이 상태에서 이 $z$축에 대해서 $\delta$만큼 회전을 하는 것은 $\lambda$에 대해서 $\lambda$만큼 회전하는 것과 같은 표현법이 되겠습니다. 이렇게 표현해서 바꿔서 회전한 다음에 다시 원래대로 거꾸로 돌아갑니다. $y$축에 대해서, 아까는 $-\beta$만큼 회전했기 때문에, 이번에는 $+\beta$만큼 회전하고 다시 $x$축에 대해서 $-\alpha$만큼 회전하게 된다면 람다에 대해서 $\delta$만큼 회전하는 것을 이렇게 5번의 로테이션으로 5개의 로테이션으로 나누어서 2 방법의 일치성을 찾아볼 수 있게 됩니다.
.jpg)
이렇게 5개의 회전을 위에 보이는 수식처럼 차례대로 기술해보았습니다. $x$축에 대한 $\alpha$만큼의 회전 다시 $y$축의 $-\beta$만큼 회전 $z$축에 대해서 $\delta$만큼 회전, $y$축에 대해서 $\beta$만큼 회전 다시 $x$축에 대해서 $–\alpha$만큼 회전 이런 식으로 5가지 로테이션 매트릭스로 오일러 정리라고 불리는, $\lambda$에 대해서 $\delta$만큼의 회전을 이렇게 표현해보았습니다. 조금 수식이 복잡하기 때문에 약간씩 약어를 써서 $v\delta$라고 하는 것은, $1-cos\delta$라는 것으로 표현했고 이런 식으로 5가지 매트릭스를 1개의 식으로 썼을 때 이렇게 매트릭스로 으;에 보이는 매트릭스대로 나오는 것을 확인할 수 있습니다.
Rodrigues’formula
.jpg)
이 복잡해 보이는 것을 Identity Matrix와 그리고 skew-symmetric matrix, 그리고 $\delta$, $sin\delta$, $cos\delta$의 값을 이용해서 위와 같은 값으로 나타낼 수 있게 됩니다.
이렇게 식으로 나타내는 것을, 바로 Rodrigues’formula라고 말합니다.
이렇게 오일러 정리를 나타내는 매트릭스의 조합을 이와 같은 수식으로 표현할 수 있습니다.
이렇게 Rodrigues’formula가 주어지고 여기에서 $\lambda$가, 아까 말했던 Euler axis가 되겠고,
그리고 $\lambda$의 옆의 곱하기 표현된 것이 매트릭스에서 살펴본 skew-symmetric matrix를 만든 것과 같은 식입니다.
그렇게 $\lambda$ 옆에 곱하기 표시가 있는 것은 $\lambda$를 이용한 skew-symmetric matrix, cross product를 만들기 위한 skew-symmetric matrix를 표현한 것과 같고
$[\lambda X]^2$은, 계산해 보면, $\lambda\lambda^T-I_{3X3}$ 라고 하는 것으로 얻어진다는 것을 확인할 수 있게 됩니다.
.jpg)
그래서, 최종적으로, Rodrigues’formula를 이렇게 얻어지는 것을, 앞서서의 식으로서 충분히 설명이 가능하다, 단순한 식으로 이렇게 간단하게 표현할 수 있다는 것을 살펴봤습니다.
.jpg)
.jpg)
일단은 우리는 매트릭스가 주어지게 되면 그 매트릭스로부터 알고 싶은 것은 얼마만큼의 회전이 이루어졌는지에 대한 그 회전량, 즉 $\delta$가 되겠고 그 다음에 어느 축에 대해서 회전이 이루어졌는지 그 축에 대한 $\lambda$ 라고 하는 그 축을 얻고 싶을 겁니다. 이랬을 때 이 Rodrigues’formula를 통해서, 3 by 3 매트릭스를 가지고 있었을 때 그 매트릭스의 각 인자들을 각각 $r_{32}$, $r_{23}$, $r_{11}$, 이런 식으로 명명했을 때 그 값들을 이용해서 옆에 보이는 식처럼 $tan\delta$는 이와 같은 식으로 $tan\delta$를 정의할 수 있고 이렇게 얻어진 것을 $arctan\delta$를 취해서 $\delta$를 얻게 됩니다. 역시 이렇게 얻어진 $\delta$를 활용해서 옆에 보이는 $\lambda$를 구하는 식
즉 $1 \above 1pt 2sin\delta$을 곱한 다음 $r_{32}$에서 $r_{23}$을 빼고, $r_{13}$에서 $r_{31}$을 빼고, 이런 식으로 각각의 파라미터 값을 가져와서 빼게 되면 $\delta$와 $\lambda$를 얻을 수 있게 됩니다.
.jpg)
이러한 Rodrigues’formula에서 대표적으로 $z$축에 대한 회전도 역시 Euler’s Theorem 에서 어떤 2가지의 두 프레임은 무조건 어떠한 이 회전하는 축과 그 회전하는 축에 대한 일정한 각도, 이 2가지로 표현이 가능하다라고 했는데 이 2가지 표현을 $z$축에 대한 로테이션, 이 역시 마찬가지로 성립해야 하기 때문에 이와 같이, $z$축에 대한 $\theta$만큼의 회전 매트릭스, 즉 $cos\theta$, $-sin\theta$, 0, $sin\theta$, $cos\theta$, 0, 0,0,1 로 되어 있는 이러한 $z$축에 대한 $\theta$만큼의 회전 매트릭스에서 먼저 $tan\delta$를 뽑아내게 되면 앞서서의 formula를 그대로 사용하게 되면 $2sin\theta \above 1pt 2cos\theta$, 즉 $tan\theta$가 얻어지게 되고 이 $\delta$와 $\theta$가 같다, 즉 $\delta$가 $\theta$가 된다는 것을 확인할 수 있습니다. $\lambda$는 $ 1 above 1pt 2sin\theta$인데 앞서서의 수식을 그대로 적용하게 되면 0,0,$2sin\theta$라는 것을 얻을 수 있게 됩니다. 그래서, 결과적으로는 0,0,1, $z$축에 대해서, $z$축은 0,0,1로 표현됩니다 $z$축에 대한 $\theta$만큼의 회전으로서 Rodrigues’formula가 그대로 성립한다는 것을 예제를 통해 살펴볼 수 있었습니다.
.jpg)
앞서서, 어떤 로테이션 같은 경우에는 ‘commute하지 않다’, 즉 로테이션은 순서에 따라서 어떤 식을 먼저 돌리느냐에 따라서 결과값이 달라진다고 했습니다.
그렇지만, 로테이션 매트릭스가 굉장히 작은 로테이션만큼 이루어졌을 경우에는 그 로테이션끼리는 서로 commute하게 됩니다.
.jpg)
무슨 말인고 하니 만약에 $R_1$로테이션을 $x$에 대해서 $\delta_1, $\delta_1은 굉장히 작은 값이라는 의미입니다.
이 $\delta_1$만큼의 회전이 이루어졌을 때 옆에서 보는 것처럼 $x$에 대한 회전에서 $cos $sin이 $\delta$ 값이 굉장히 작을 경우에는 $cos$은 1로 수렴하게 되고, $sin$은 $\delta$로 수렴하게 됩니다.
3그래서, 위에 보이는 것처럼, [1,0,0], [0,1,$-\delta_1$], [0,$\delta_1$,1] 이런 형식의 매트릭스를 얻게 됩니다.
.jpg)
마찬가지로, $z$축에 대해서 $\delta_2$ 만큼의 회전을, 역시 $\delta_2$가 굉장히 작다고 했을 경우
결과적으로, [1,$-\delta_2$, 0], [$\delta_2$, 1, 0], [0,0,1]이라 하는 이러한 매트릭스를 얻게 됩니다.
이랬을 경우에는, $R_1$ 과 $R_2$를 곱했을 때 이 결과값이 $\delta_2$와 $\delta_1$을 곱했을 때, 즉 어떤 식으로 먼저 로테이션을 수행하는지 $x$축으로 먼저 돌리고 나중에 $y$축을 돌리고, $y$축을 먼저 돌리고, $x$축을 나중에 돌리고 이런 굉장히 작은 로테이션일 경우에는 로테이션도 마치 $x$방향, $y$방향, $y$방향, $x$방향, 이런 식으로 Translation, 즉 이동하는 것과 마찬가지로 commute하다는 것을 확인할 수 있습니다.
.jpg)
Rodrigues’formula를 통해서, 이것들이 어떻게 증명이 되는지 한변 살펴보도록 하겠습니다.
Rodrigues’formula에서 이 formula를 이용해서 나온 $\delta$값이 굉장히 작다고 했을 때 위에 보이는 식처럼, $I+\delta[\lambda X]$로 이렇게, 마지막에 있는 항이, $1-cos\delta$였기 때문에 $cos\delta$가 1이었습니다. 그래서 $cos\delta$를 1로 치환하게 되면 사라지고 이와 같은 $sin\delta$가, $\delta$가 되는 이런 식으로 주어지게 되고
.jpg)
이런 식으로 주어진 것들을 바탕으로 해서 $\delta_1$만큼 $\delta_2$만큼,어떤 식으로 이루어지더라도, 결과적으로는 이와 같이, 위에 보이는 식처럼, $I+\delta_1,\delta_2$의 조합으로 표현이 된다는 것을 확인할 수 있습니다. 그래서, 굉장히 작게 돌아갔을 경우에는 작은 각도로 회전할 경우에는 로테이션끼리 서로 commute한다는 것을 확인할 수 있게 됩니다.
.jpg)
한번 정리를 하고 넘어가자면, 우리는 로테이션을 표현하는 여러 방법이 있다고 이야기했고,
그 로테이션을 표현하는 방법은, 로테이션 매트릭스라고 얘기하기도 하고, direction cosine matrix라고 하기도 합니다.
다른 한편으로는, 어떠한 프레임에 대해서, 다른 프레임의 기준좌표, XYZ를 어떻게 표현하는지에 대한, 그 표현법이라고 말하기도 하고,
그 다른 프레임 원래의 프레임에서의 한 벡터를 이 기준좌표계의 XYZ로 투영시키기 위해서, projection시키기 위해서, projection시키는 개념으로, 로테이션 매트릭스를 살펴보기도 했습니다.
.jpg)
또는, Euler angle로서 2개의 좌표계를 바꾸는 방법 12개의 각기 다른 센서를 통해서 표현하는 방법도 살펴보았고
그리고, Euler axis와 Euler angle을 통해서 하나의 축과 회전 각도를 통해서 2개의 좌표계를 완벽하게 일치시킬 수 있다는 것도 살펴보았습니다.
이 2가지, 금방 말했던 축과 각도를 가지고 표현하는 4가지의 파라미터로 표현하는, quaternion 방법을 통해서, 각도를 표현하는 것도 가능하고 이런 것들은 Euler angle이 가지는 단점들을 어느 정도는 제거할 수 있다고 말씀드렸습니다.
.jpg)
여기까지 배운, 이러한 내용을 바탕으로, 어떤 좌표에서 어떻게, 이러한 개념에서 저러한 개념으로, 그 표현하는 방법과 개념들 사이의 상관관계와, 모든 것들을 왔다갔다할 수 있는 그러한 방법들에 대해서 익숙해질 필요가 있을 것입니다.